Уже довольно долго время делаю ездящую машинку на базе платформу Cherokey 4WD. Удалось решить большинство хардварных проблем, завести датчики (кроме модуля часов, который почему-то дохнет время от времени). Поэтому в настоящее время активно занимаюсь написанием ПО. Буквально в эти выходные удалось заставить работать IMU. Результат (правда только для гироскопа) можно посмотреть на этом видео:
Подробные комментарии, как и что там внутри будут видимо несколько позже.
Cherokey 4 WD robot
Сообщений: 3
• Страница 1 из 1
Cherokey 4 WD robot
![]() phoenix367 » 20 янв 2014, 02:15
phoenix367 » 20 янв 2014, 02:15
- phoenix367
- Сообщения: 193
- Зарегистрирован: 09 сен 2013, 00:19
Re: Cherokey 4 WD robot
![]() phoenix367 » 09 июн 2014, 23:52
phoenix367 » 09 июн 2014, 23:52
наконец-то сделал передачу видео не только по wifi, но и по аналоговому каналу через 5,8 ГГц передатчик. Принятый видеосигнал через модель EasyCap поступает в цифровом виде в компьютер. Качество видео конечно так себе, но в качестве резервного канала передачи изображения вполне сойдет.
- phoenix367
- Сообщения: 193
- Зарегистрирован: 09 сен 2013, 00:19
Re: Cherokey 4 WD robot
![]() phoenix367 » 03 июл 2014, 00:49
phoenix367 » 03 июл 2014, 00:49
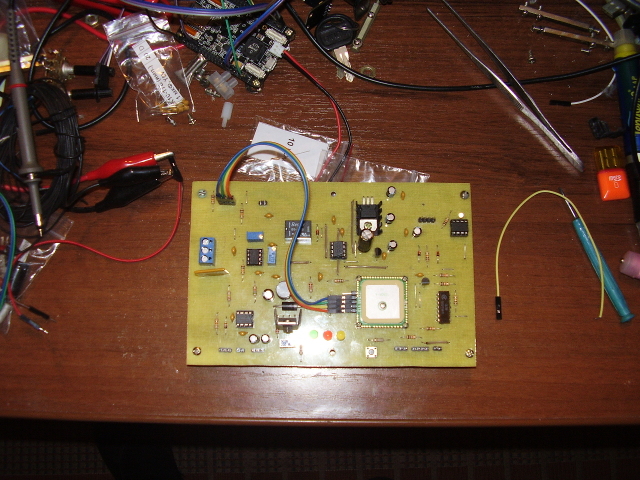
Сделал плату коммутации с датчиками. Получилось неплохо за исключением пары недоработок, которые легко исправились непосредственно на плате. Теперь количество проводов уменьшилось, а функционал остался. Форм-фактор платы сделал совместимым с платформой Cherokey 4 WD, так что проблем с размещением всего этого хозяйства не возникло.
Плата выглядит так:
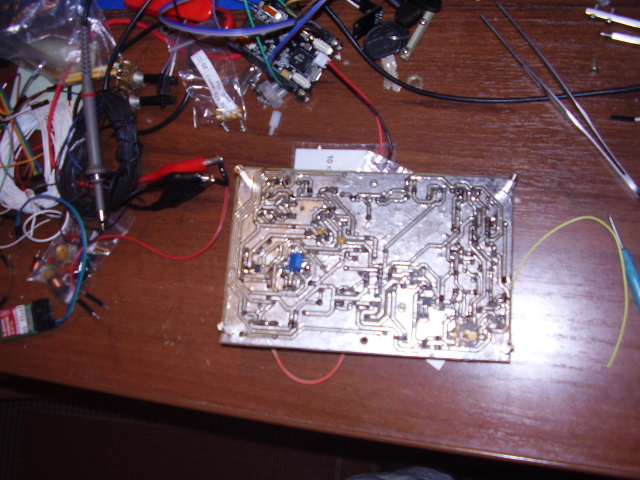
А это вид снизу:
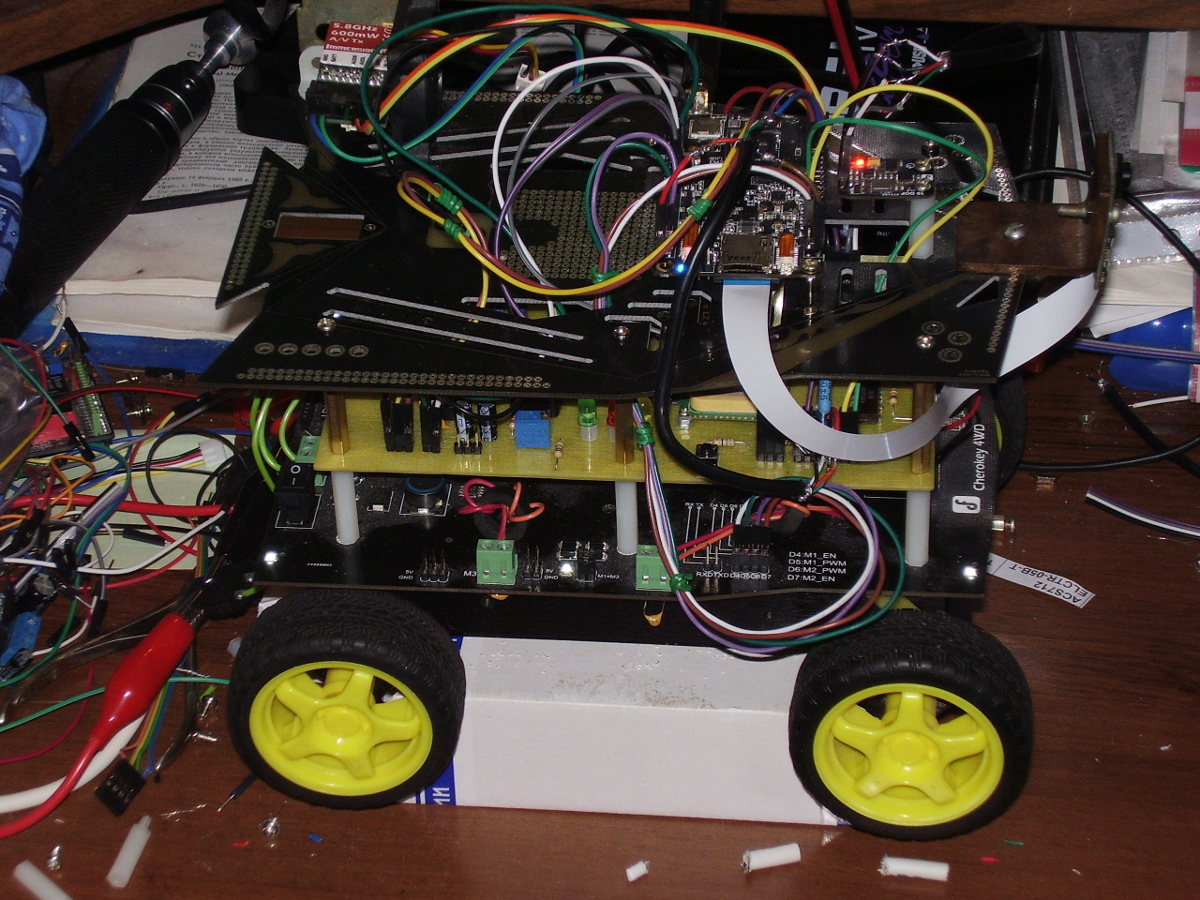
Робот в сборе:
Плата выглядит так:
А это вид снизу:
Робот в сборе:
- phoenix367
- Сообщения: 193
- Зарегистрирован: 09 сен 2013, 00:19
Сообщений: 3
• Страница 1 из 1
Вернуться в Проекты на базе Виртурилки
Кто сейчас на конференции
Сейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 4