Лучше не напишешь. Я так и понял. Но до этого пришлосс пару микрон кожи с пальцев стереть об клавиатуру.
Благодарю! Хорошо когда такик люди есть. Все! Сношу винду.
virt2real.ru
Управляем чем угодно откуда угодно
http://forum.virt2real.ru/
Где посмотреть пример программы на с/с++ для vir2real ?
Страница 3 из 5
Re: Где посмотреть пример программы на с/с++ для vir2real ?
Re: Где посмотреть пример программы на с/с++ для vir2real ?
Re: Где посмотреть пример программы на с/с++ для vir2real ?
Re: Где посмотреть пример программы на с/с++ для vir2real ?
Re: Где посмотреть пример программы на с/с++ для vir2real ?
Помогите разобраться с компиляцией. Пытаюсь собрать хелоуворд но даже если просто запустить virt-gcc пишет Segmentation fault. Убунта.
Re: Где посмотреть пример программы на с/с++ для vir2real ?
Re: Где посмотреть пример программы на с/с++ для vir2real ?
Я выкладываю свои поделия на гитхаб
https://github.com/eagafonov/v2r-demos
Пока в наличии:
- Пара helloword'в
- Семпл общения с ADC через ioctl (нужно модифицированное ядро)
- Часть библиотек ArduPilot + демка AP_Compass_Test
Всё строится CMake'ом и копиряется на в2р автоматически.
CMake'ом, кстати очень красиво получается оформить кросс-компиляцию. Буду двигатся в этом направлении.
https://github.com/eagafonov/v2r-demos
Пока в наличии:
- Пара helloword'в
- Семпл общения с ADC через ioctl (нужно модифицированное ядро)
- Часть библиотек ArduPilot + демка AP_Compass_Test
Всё строится CMake'ом и копиряется на в2р автоматически.
CMake'ом, кстати очень красиво получается оформить кросс-компиляцию. Буду двигатся в этом направлении.
Re: Где посмотреть пример программы на с/с++ для vir2real ?
Re: Где посмотреть пример программы на с/с++ для vir2real ?
Вставлю свои пять копеек. Наконец-то допилил до некоторого юзабельного состояния сетевую управлялку на QT. Исходники можно посмотреть здесь . Выглядит интерфейс управления прямо скажем бедновато пока, но это скорее некий технологический концепт.
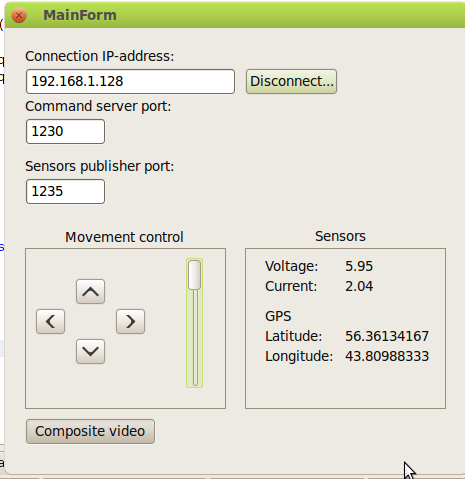
Программа позволяет управлять колесным роботом на платформе Cherokey 4 WD с виртурилкой в качестве управляющего контроллера. Пока имеется возможность двигать платформу вперед, назад, поворот вправо, поворот влево, включать и выключать видеопередатчик и трансляцию видео. Также имеется возможность дистанционно в реальном времени снимать показания датчиков напряжения, потребляемого тока, а также координат GPS. Планируется еще подцепить IMU для более точного трекинга положения платформы в пространстве.
Собственно код пока довольно сырой и будет серьезно допиливаться, инструкцию по сборке писать некогда Скажу только, что на пользователской машине должен быть поставлен буст, protobuf-2.4.1, codesourcery компилятор, zeromq. Возможно что-то еще забыл. Надеюсь данный концепт натолкнет кого-то на собственные идеи или даст отправную точку для реализации собственных приложений для виртурилки несколько сложнее хелловолда.
Скажу только, что на пользователской машине должен быть поставлен буст, protobuf-2.4.1, codesourcery компилятор, zeromq. Возможно что-то еще забыл. Надеюсь данный концепт натолкнет кого-то на собственные идеи или даст отправную точку для реализации собственных приложений для виртурилки несколько сложнее хелловолда.
Программа позволяет управлять колесным роботом на платформе Cherokey 4 WD с виртурилкой в качестве управляющего контроллера. Пока имеется возможность двигать платформу вперед, назад, поворот вправо, поворот влево, включать и выключать видеопередатчик и трансляцию видео. Также имеется возможность дистанционно в реальном времени снимать показания датчиков напряжения, потребляемого тока, а также координат GPS. Планируется еще подцепить IMU для более точного трекинга положения платформы в пространстве.
Собственно код пока довольно сырой и будет серьезно допиливаться, инструкцию по сборке писать некогда